
【儀表網 研發快訊】結構光三維重建技術廣泛應用于智能制造、自動駕駛、人臉識別等領域。條紋投影輪廓測量作為主要的結構光3D重建技術之一,因其穩定性和高精度在工業和科研中得到了廣泛應用。然而,條紋輪廓測量的前提是獲取精準的調制圖案,這一過程中,受到相機成像動態范圍的限制,尤其是對于具有不同表面反射率的物體,重建效果往往不理想,極大地限制了其在復雜場景中的應用,特別是在工業零部件的測量中,傳統的多次曝光圖案合成方法效率低,難以滿足快速和高精度的需求。因此,如何快速準確地獲取高動態范圍圖像,成為提升三維測量精度的關鍵挑戰。深度神經網絡作為數據驅動的方法,已成為提升高動態范圍(HDR)場景下快速高精度測量的重要方向。
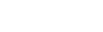
近日,清華大學深圳國際研究生院李星輝副教授團隊與鵬城實驗室合作提出了一種基于深度學習的HDR結構光三維重建網絡——高動態范圍結構光網絡(HDRSL-Net)。該網絡包含HDR條紋生成模塊和相位求解模塊。HDR條紋生成模塊通過長短曝光的低動態范圍條紋圖輸入,利用注意力權重引導網絡聚焦于高反射物體的低曝光條紋和低反射物體的高曝光條紋特征,同時通過特征層的權重蒸餾約束特征邊界,從而合成具有相位特征的HDR條紋,顯著減少所需曝光次數。相位求解模塊則解算重建后的HDR條紋圖案中的相位信息。最終,HDRSL-Net保留了傳統多次曝光相移方法的高精度和抗干擾性,將所需條紋圖案由傳統的K×N×M減少至2×N×1,大幅提升了測量速度。
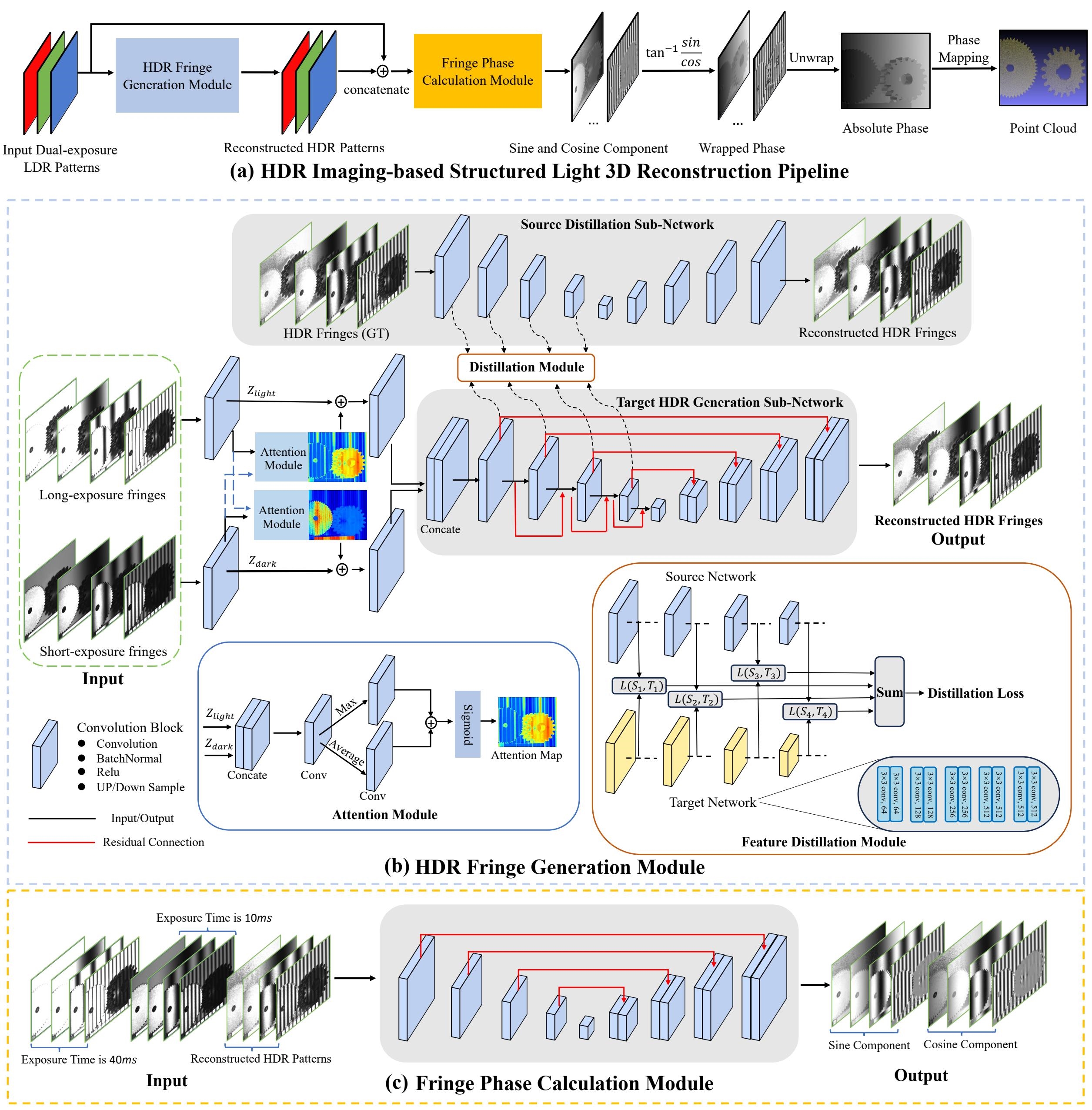
圖1.HDRSL Net網絡結構
針對當前缺乏HDR場景結構光數據集的問題,研究團隊基于工業應用場景,搭建了面向HDR場景的結構光測量系統,并整理了包含1700組金屬物體的結構光數據集。該數據集涵蓋不同反射率材料、機加工特征、形狀和尺寸,每個物體采用4次曝光、4頻、12步相移法處理,結果作為真值數據。該數據集可作為HDR場景測量的結構光基準數據集。
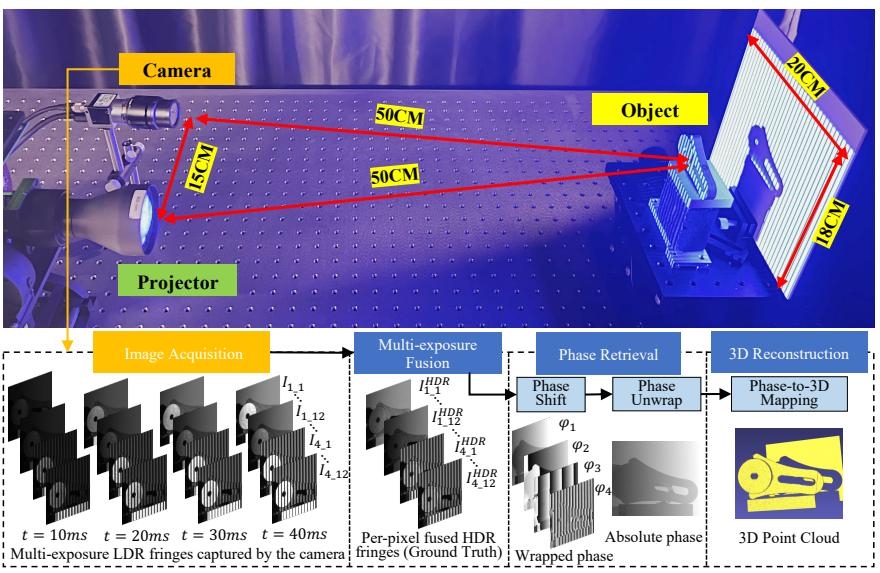
圖2.HDR結構光測量系統
圖3.金屬數據集(a)-(e)為高反射(鋁合金、不銹鋼、鍍鎳合金、鋁、黃銅);(f)和(g)為低反射材料(氧化鎂合金、鑄鐵)
在金屬數據集上,HDRSL-Net能同時重建高反射率、正常反射率和低反射率物體的HDR條紋,并精確求解其絕對相位和三維形貌。該方法在金屬數據集上實現了MAE 0.0105的相位誤差,接近傳統6步相移法,同時僅需8.3%的條紋圖案,并通過實驗驗證了其抗反射干擾的能力。此外,HDRSL-Net在公開的石膏數據集上達到了接近傳統4步相移法的相位精度,并在標準件物體(如球體、平面、金屬階梯)上實現了sub50微米的三維重建精度,顯著優于現有面向HDR場景的各種結構光網絡。該方法不僅保留了多步PSP方法的高精度與抗干擾性,還顯著減少了對投影條紋圖樣的依賴,推動了深度學習結構光方法的實際應用。
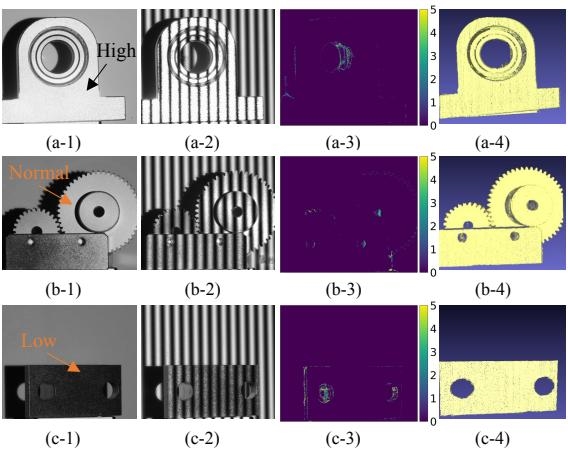
圖4. 不同反射率物體結果(1)物體圖;(2)HDR生成模塊重建條紋;(3)絕對相位誤差;(4)重建的三維點云
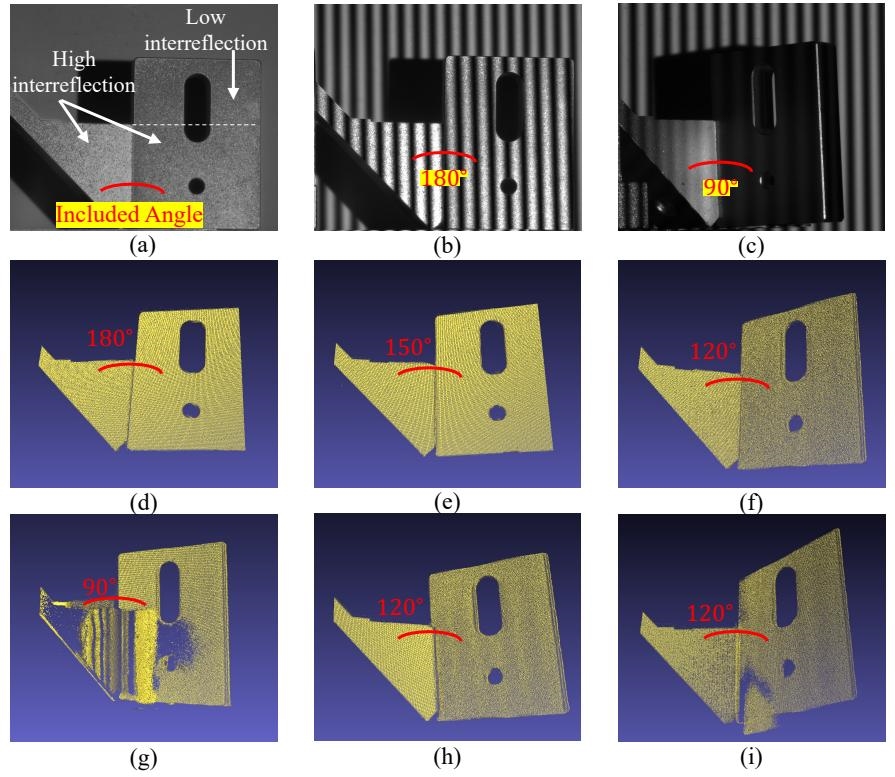
圖5.HDRSL Net抗金屬互反射特性驗證
研究成果以“HDRSL-Net基于高動態范圍成像的高精度結構光三維重建”(HDRSL-Net for Accurate High Dynamic Range Imaging-based Structured Light 3D Reconstruction)為題,于8月25日發表于《IEEE圖像處理》(IEEE Transactions on Image Processing)。
清華大學深圳國際研究生院2023級博士生王浩為論文第一作者,深圳國際研究生院副教授李星輝為論文通訊作者,鵬城實驗室副研究員梁驍俊為共同通訊作者。其他作者包括鵬城實驗室助理研究員張超波,清華大學深圳國際研究生院副教授錢翔、教授王曉浩,中南大學桂衛華院士及鵬城實驗室高文院士。研究得到深圳市自然科學基金項目、鵬城實驗室重大攻關項目等的支持。


















所有評論僅代表網友意見,與本站立場無關。